Induction motors are the backbone of industrial automation and power systems with approximately 90% of all industrial motors being three-phase induction motors. They power everything from small household appliances to massive industrial machinery. Among the various types of induction motors, the squirrel cage and slip ring induction motors stand out as the two most widely used configurations.
In this technical guide, we will discuss the difference between squirrel cage and slip ring induction motors in terms of their construction, working principles, characteristics, efficiency, power factor, advantages, disadvantages, and practical applications.
1. What is an Induction Motor?
Before we explore the differences, let us first establish what an induction motor actually is. An induction motor is an AC electric motor where the electric current in the rotor is produced by electromagnetic induction from the magnetic field of the stator winding.
The stator is the stationary part of the motor that produces a rotating magnetic field when connected to an AC supply. The rotor is the rotating part that follows this magnetic field and produces mechanical power.
Induction motors are classified into two main categories based on their rotor construction: squirrel cage induction motors and slip ring (wound rotor) induction motors.
2. What is a Squirrel Cage Induction Motor?
A squirrel cage induction motor gets its name from the appearance of its rotor construction. The rotor consists of aluminum or copper bars that are placed in slots around the rotor core. These bars are short-circuited at both ends by end rings.

When you look at this rotor structure without the iron core, it resembles a cage that was once used to exercise pet squirrels. Hence, the name “squirrel cage” motor was born.
The construction of a squirrel cage motor is simple. There are no brushes, slip rings, or external connections required for the rotor circuit. The rotor bars and end rings form a complete closed circuit. When the rotating magnetic field from the stator cuts across these rotor bars, it induces an EMF and current flows through the bars. This current interacts with the stator magnetic field to produce torque and rotation.
3. What is a Slip Ring Induction Motor?
A slip ring induction motor, also known as a wound rotor induction motor has a more complex rotor construction compared to its squirrel cage counterpart. The rotor contains a three-phase winding similar to the stator winding.

The three ends of the rotor winding are connected to three slip rings mounted on the rotor shaft. Carbon brushes ride on these slip rings and provide electrical connection to an external resistance bank or other control equipment.
This external connection capability is what sets slip ring motors apart from squirrel cage motors. By adjusting the external resistance, you can modify the motor’s performance characteristics during starting and running conditions.
4. Difference between Squirrel Cage and Slip Ring Induction Motor
4.1 Rotor Construction
4.1.1 Squirrel Cage Induction Motor
The squirrel cage induction motor gets its name from the unique rotor design that looks like a cage used for pet squirrels. The rotor is made of a cylindrical laminated core with aluminum or copper bars arranged evenly around its outer surface. These bars run along the length of the rotor and are permanently connected at both ends by metal end rings. This straightforward and sturdy design removes the need for brushes, slip rings, or any external connections to the rotor.
In most squirrel cage motors, the rotor bars are not placed straight along the shaft. Instead, they are slightly twisted or skewed. This skewing serves several purposes. It prevents the rotor from locking magnetically with the stator teeth. It also reduces the humming noise that comes from magnetic interactions. The skewed bars help the motor produce smooth torque and eliminate cogging.
4.1.2 Slip Ring Induction Motor
In slip ring induction motors, the rotor contains three-phase windings that look similar to the stator windings. These rotor windings are connected in a star pattern. The three terminals from this star connection are brought out to three metal rings mounted on the motor shaft. These rings are called slip rings. Carbon brushes press against these slip rings and allow external resistance to be connected to the rotor circuit.
This complex construction gives engineers the ability to control external rotor resistance. By changing this resistance, you can modify how the motor starts and how fast it runs.
4.2 Starting Torque and Starting Current
4.2.1 Starting Torque
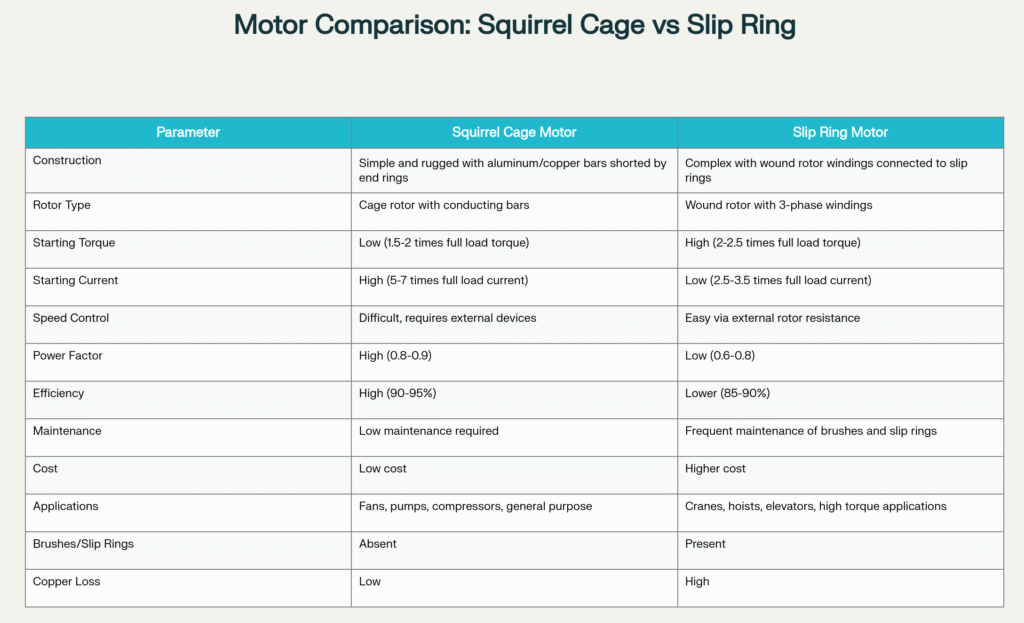
The biggest operational difference between these two motor types is their starting torque. Squirrel cage motors produce starting torque that is about 1.5 to 2 times their full load torque. Slip ring motors can achieve much higher values of 2 to 2.5 times the full load torque.
Why do slip ring motors produce more starting torque? The answer lies in the external resistance. When you insert resistance into the rotor circuit during startup, the power factor of the rotor circuit improves. This improved power factor increases the starting torque.
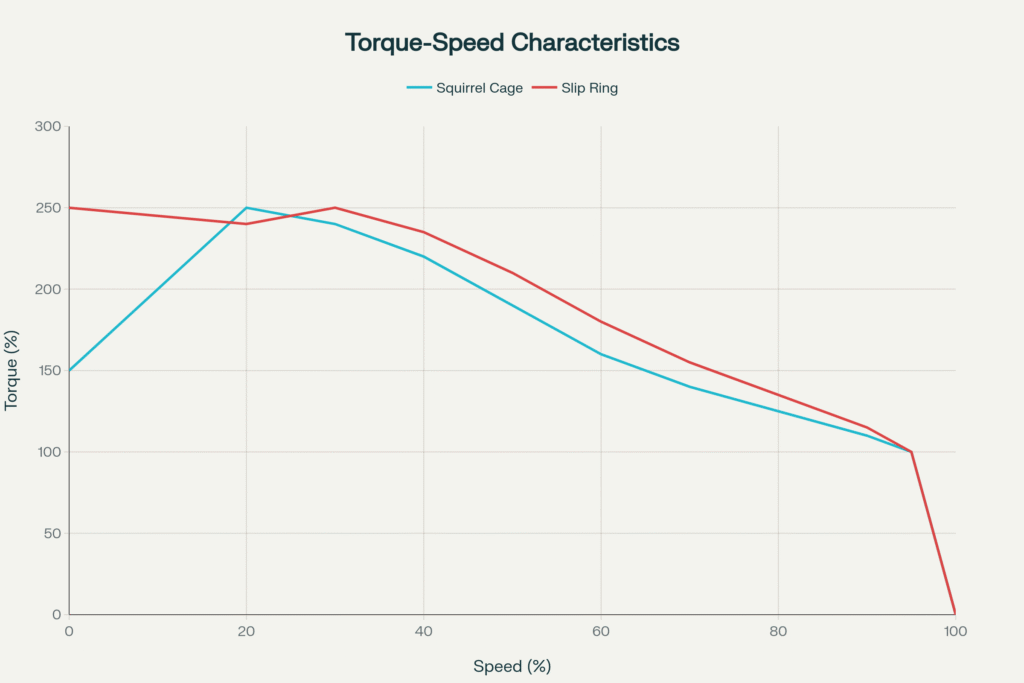
4.2.1 Starting Current
Here is where squirrel cage motors show their weakness. They draw very high starting currents. The starting current can be 5 to 7 times the full load current. This happens because the rotor has very low impedance when the motor is at standstill.
Slip ring motors handle starting much better. Their starting current is only 2.5 to 3.5 times the full load current. The external rotor resistance limits the initial current flow and keeps it within manageable levels.
4.3 Speed Control
Squirrel cage motors offer very few options for speed control on their own. The rotor bars are permanently short-circuited and you cannot change their resistance. If you want to vary the speed, you need external devices. Variable frequency drives are the most common solution today. You can also use multi-speed motor configurations or voltage control methods. But the motor itself cannot provide speed variation.
Slip ring motors are excellent for speed control applications. You can adjust the external resistance connected through the slip rings. This adjustment allows smooth speed control over a range of 50% to 100% of synchronous speed. This makes slip ring motors a great choice when you need variable speed operation without using electronic drives.
For example, consider a large industrial mixer that needs to run at different speeds depending on the material being processed. A slip ring motor can handle this task easily by adjusting the rotor resistance. A squirrel cage motor would need an expensive VFD to achieve the same result.
4.4 Efficiency
Squirrel cage motors are more efficient machines. They achieve efficiency ratings between 90% and 95% during normal operation. This high efficiency comes from minimal rotor losses and zero brush friction. The permanently short-circuited rotor bars allow current to flow with very little resistance loss.
Slip ring motors run at lower efficiency levels of 85% to 90%. Several factors contribute to this reduced efficiency. The rotor circuit has higher copper losses. The brushes rubbing against the slip rings create mechanical friction losses. These additional losses add up and reduce the overall efficiency of the motor.
4.5 Power Factor
Squirrel cage motors maintain a power factor of 0.8 to 0.9 when running at full load. This good power factor results from the direct magnetic coupling between stator and rotor. There are no external elements adding extra impedance to the circuit.
Slip ring motors have lower power factor values ranging from 0.6 to 0.8. The wound rotor has an inductive nature. The external resistance elements also affect the circuit characteristics. These factors increase the phase angle between voltage and current. A larger phase angle means a lower power factor.
4.6 Starting Methods
4.6.1 Squirrel Cage Motor Starting Methods
Squirrel cage motors need special starting methods because of their high starting current. Here are the most common starting methods:
Direct-On-Line (DOL) Starting: This is the simplest method. The motor connects directly to the full supply voltage when switched on. This method works well for smaller motors up to 7.5 kW rating. The method is cheap and simple. But the motor and power supply must handle the high inrush current that occurs at startup.
Star-Delta Starting: This method is very popular in industry. The stator windings first connect in a star configuration. This reduces the starting voltage to 58% of the normal line voltage. When the motor reaches about 80% of its running speed, the connection switches to delta. The motor then runs at full voltage. This two-step process reduces starting current while allowing the motor to reach full speed.
Auto-Transformer Starting: This method uses a three-phase auto-transformer. The transformer provides reduced voltage during starting. The voltage is usually set between 60% and 80% of the supply voltage. As the motor speeds up, it switches to full voltage operation. This method offers flexibility in choosing the starting voltage level.
4.6.2 Slip Ring Motor Starting Control
Rotor Resistance Starting is the main control method for slip ring motors. External resistance banks connect to the rotor circuit through the slip rings. These resistance banks provide high starting torque while keeping the starting current low. As the motor picks up speed, the resistance is gradually reduced. When the motor reaches full speed, the slip rings are short-circuited and the motor runs like a regular induction motor.
4.7 Applications
4.7.1 Squirrel Cage Motor Applications
The simple construction, low maintenance needs, and affordable price make squirrel cage motors the right choice for many general-purpose applications:
- Fans and Blowers: These applications run at constant speed and need only moderate starting torque.
- Centrifugal Pumps: Pump loads have smooth torque characteristics that match squirrel cage motor capabilities.
- Compressors: Continuous duty applications benefit from the reliable operation of squirrel cage motors.
- Conveyor Systems: Standard conveyor applications have predictable load characteristics. Speed control requirements are usually simple enough for squirrel cage motors to handle.
4.7.2 Slip Ring Motor Applications
The high starting torque and speed control features of slip ring motors make them necessary for demanding applications:
- Cranes and Hoists: Lifting heavy loads requires high starting torque. Precise speed control allows operators to position loads accurately. Slip ring motors handle both requirements effectively.
- Elevators: Passengers expect smooth rides. Slip ring motors provide smooth acceleration and deceleration. Variable speed operation allows precise floor positioning.
- Ball and Sag Mills: These grinding machines have high inertia. They need gradual speed buildup to avoid stressing the mechanical components. Slip ring motors can provide controlled acceleration over extended periods.
- Large Pumps and Fans: Some large installations need soft-start capabilities. Speed variation may also be required for process control. Slip ring motors deliver these features without complex electronic drives.
4.8 Maintenance
Squirrel cage motors need very little maintenance during their service life. There are no brushes to replace and no slip rings to clean. Routine maintenance includes lubricating the bearings at recommended intervals. Technicians should monitor vibration levels and check for unusual heat buildup. With proper care, these motors can run for 20 to 30 years without major repairs.
Slip ring motors demand more attention from maintenance personnel. The brush and slip ring assembly needs regular inspection. Brushes wear down over time and require replacement. Slip rings collect carbon dust and may need cleaning. Sometimes the slip ring surface becomes rough and needs machining to restore smoothness. The external resistance bank also needs periodic inspection to check for damaged elements and loose connections. All this additional work increases maintenance costs and leads to more downtime.
4.9 Selection
Choosing between squirrel cage and slip ring induction motors depends on what your application needs. You must balance performance requirements against cost and operational factors.
Pick a squirrel cage motor when:
- Your application runs at constant speed
- You value simplicity and reliability above all else
- Low maintenance is a priority
- You want to minimize upfront costs
- Starting torque requirements are moderate
Pick a slip ring motor when:
- Your application demands high starting torque
- You need to start heavy loads from standstill
- Precise speed control is necessary
- Soft starting without electronic drives is preferred
- The load has high inertia and needs controlled acceleration
5. Conclusion
The choice between squirrel cage and slip ring induction motors depends primarily on application-specific requirements balancing performance, cost, and operational factors. Squirrel cage motors excel in constant-speed, general-purpose applications where simplicity, reliability, and low maintenance are paramount. Their dominance in industrial applications reflects the robust design, cost-effectiveness, and minimal maintenance requirements.
Slip ring motors remain essential for applications demanding high starting torque, precise speed control, or soft-starting capabilities. Despite higher initial costs and maintenance requirements, they provide unique advantages for heavy-duty, variable-speed applications where their superior characteristics justify the additional complexity.
6. Frequently Asked Questions (FAQs)
The main difference lies in the rotor construction. Squirrel cage motors have a rotor made of aluminum or copper bars short-circuited by end rings. Slip ring motors have a wound rotor with three-phase windings connected to slip rings for external connections.
The rotor construction resembles a cage that was once used for pet squirrels to exercise. When you remove the iron core and look at just the bars and end rings, the structure looks like a cylindrical cage.
Yes, you can control the speed of a squirrel cage motor using a variable frequency drive (VFD). The VFD changes the supply frequency, which directly affects the motor speed. Other methods like pole changing and voltage variation offer limited speed control.
Slip ring motors can have external resistance added to their rotor circuit during starting. This resistance increases the rotor impedance at low speeds, which shifts the torque curve to produce maximum torque at or near zero speed.
Slip ring motors require more maintenance. They have carbon brushes that wear out and need periodic replacement. The slip rings also require cleaning and occasional resurfacing. Squirrel cage motors have no brushes or slip rings, so they need minimal maintenance.
Yes, slip ring motors cost more than squirrel cage motors of the same power rating. The wound rotor, slip ring assembly, brush holders, and external resistance starter add to the manufacturing cost.
No, you cannot convert a slip ring motor to a squirrel cage motor. The rotor construction is fundamentally different. However, you can short-circuit the slip rings after the motor reaches full speed, which makes it run similar to a squirrel cage motor at that point.
Yes, slip ring motors can run with the slip rings short-circuited and no external resistance. However, starting the motor this way will result in high starting current and low starting torque, similar to a squirrel cage motor.