Electric motors are the backbone of modern industrial and domestic applications. From running ceiling fans to powering heavy machinery in factories, electric motors play a major role in our daily lives. Among the various types of motors, synchronous motors and asynchronous motors are two commonly used AC motors that engineers and students often encounter.
In this technical guide, we will discuss the major differences between synchronous motors and asynchronous motors. We will also look at their construction, working principles, advantages, disadvantages, and real-world applications to give you a clear picture of both motor types.
1. Synchronous Motor
1.1 What is a Synchronous Motor?
A synchronous motor is an AC motor that operates at a constant speed called synchronous speed. This speed remains the same regardless of the load applied to the motor. The synchronous speed depends on the frequency of the supply and the number of poles in the motor.
The synchronous speed can be calculated using the formula:
\(N_s = \frac{120f}{P}\)
Where:
- \(N_s\) = Synchronous speed in RPM
- \(f\) = Supply frequency in Hz
- \(P\) = Number of poles
For example, a 4-pole synchronous motor connected to a 50 Hz supply will run at 1500 RPM. This speed will not change even when the load increases or decreases.
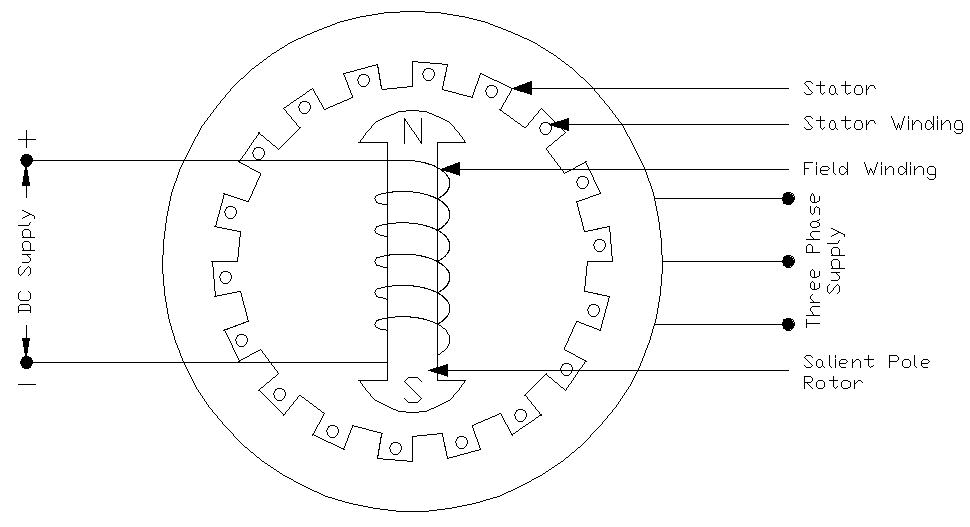
1.2 Construction of Synchronous Motor
A synchronous motor consists of two main parts:
- Stator: The stator is the stationary part of the motor. It carries the three-phase armature winding that produces a rotating magnetic field when connected to the AC supply.
- Rotor: The rotor is the rotating part that carries the field winding. This winding is excited by a separate DC supply. The rotor can be of salient pole type or cylindrical type depending on the application.
1.3 Working Principle of Synchronous Motor
When a three-phase supply is given to the stator winding, a rotating magnetic field is produced. This field rotates at synchronous speed. The rotor is excited with DC supply to create magnetic poles. The rotor poles get locked with the rotating magnetic field of the stator and rotate at the same speed.
One important point to note is that synchronous motors are not self-starting. They require some external method to bring the rotor near synchronous speed before they can start running. This is done using damper windings, pony motors, or variable frequency drives.
2. Asynchronous Motor
2.1 What is an Asynchronous Motor?
An asynchronous motor is also known as an induction motor. It is called asynchronous because the rotor does not rotate at the synchronous speed. There is always a difference between the rotor speed and the synchronous speed. This difference is called slip.
The slip of an induction motor can be calculated as:
\(\text{Slip (s)} = \frac{N_s-N_r}{N_s} × 100%\)
Where:
- \(N_s\) = Synchronous speed
- \(N_r\) = Rotor speed
For example, if the synchronous speed is 1500 RPM and the rotor runs at 1440 RPM, then the slip is 4%.
2.2 Construction of Asynchronous Motor
An asynchronous motor also has two main parts:
- Stator: The stator construction is similar to that of a synchronous motor. It has a three-phase winding that produces a rotating magnetic field.
- Rotor: The rotor can be of two types squirrel cage rotor or wound rotor. The squirrel cage rotor has aluminum or copper bars short-circuited at both ends. The wound rotor has a proper three-phase winding connected to slip rings.
2.3 Working Principle of Asynchronous Motor
When the stator is connected to a three-phase supply, a rotating magnetic field is produced. This rotating field cuts the rotor conductors and induces an EMF in them according to Faraday’s law. Since the rotor conductors are short-circuited, current flows through them.
This current-carrying conductor experiences a force in the magnetic field and starts rotating. The rotor tries to catch up with the rotating magnetic field but can never reach the same speed. If it does, there will be no relative motion between the field and rotor, no induced EMF, no current, and hence no torque.
This is why induction motors always run at a speed lower than synchronous speed. The slip provides the necessary relative motion for the motor to develop torque.
3. Differences Between Synchronous and Asynchronous Motors
Let us now look at the major differences between these two motor types:
3.1 Operating Speed
A synchronous motor always runs at synchronous speed. The rotor speed is exactly equal to the speed of the rotating magnetic field. There is no slip in this motor.
An asynchronous motor always runs below synchronous speed. There is always some slip present. The rotor never catches up with the rotating magnetic field.
3.2 Rotor Excitation
In a synchronous motor, the rotor requires a separate DC excitation. This DC supply creates the rotor magnetic poles that lock with the stator field.
In an asynchronous motor, no separate excitation is needed for the rotor. The rotor gets its excitation through electromagnetic induction from the stator field.
3.3 Self-Starting Capability
Synchronous motors are not self-starting. They need external means to start. You cannot simply switch on a synchronous motor and expect it to run. Some starting arrangement is always required.
Asynchronous motors are self-starting. When you connect them to the supply, they start rotating on their own. This makes them very convenient for most applications.
3.4 Slip
Synchronous motors operate at zero slip. The rotor and the rotating magnetic field move at the same speed. Asynchronous motors always have some positive slip. The slip value is usually between 2% to 5% for most industrial motors.
3.5 Power Factor
Synchronous motors can operate at unity, leading, or lagging power factor. By adjusting the DC excitation, the power factor can be controlled. An overexcited synchronous motor can supply reactive power and improve the power factor of the system.
Asynchronous motors always operate at lagging power factor. They draw reactive power from the supply. The power factor is usually between 0.8 to 0.9 at full load.
3.6 Construction Complexity
Synchronous motors have a more complex construction. They require slip rings and brushes to supply DC to the rotor. The excitation system adds to the complexity.
Asynchronous motors, especially squirrel cage type, have a very simple and rugged construction. There are no slip rings or brushes in squirrel cage motors.
3.7 Cost
Synchronous motors are more expensive due to their complex construction and excitation system. Asynchronous motors are cheaper and more economical. This is one reason why they are so widely used in industry.
3.8 Maintenance
Synchronous motors require more maintenance because of slip rings, brushes, and excitation system. Asynchronous motors require less maintenance. Squirrel cage motors are almost maintenance-free.
3.9 Efficiency
Synchronous motors have higher efficiency, especially at larger sizes. They are preferred for high-power applications. Asynchronous motors have slightly lower efficiency compared to synchronous motors of the same rating.
3.10 Starting Torque
Synchronous motors have zero starting torque. They need to be started using special methods. Asynchronous motors have good starting torque. Squirrel cage motors have moderate starting torque while wound rotor motors can have high starting torque.
3.11 Comparison Table: Synchronous Motor vs Asynchronous Motor
| Feature | Synchronous Motor | Asynchronous Motor |
|---|---|---|
| Speed | Constant (Synchronous speed) | Variable (Less than synchronous speed) |
| Slip | Zero | Always present (2-5%) |
| Rotor Excitation | Requires DC excitation | No separate excitation needed |
| Self-Starting | No | Yes |
| Power Factor | Can be unity, leading, or lagging | Always lagging |
| Construction | Complex | Simple |
| Cost | High | Low |
| Maintenance | More | Less |
| Efficiency | Higher | Slightly lower |
| Speed Control | Difficult | Easier with VFD |
| Starting Torque | Zero | Good |
4. Applications of Synchronous Motor and Asynchronous Motor
4.1 Synchronous Motor
Synchronous motors are used in applications where constant speed is required or power factor correction is needed. Some common applications include:
- Power Factor Correction: Large synchronous motors are used in industries as synchronous condensers. They are run without any mechanical load and are overexcited to supply reactive power to the system.
- Textile Mills: The constant speed operation makes synchronous motors suitable for spinning and weaving machines.
- Paper Mills: Rolling mills and paper manufacturing require precise speed control.
- Cement Plants: Large ball mills and kilns use synchronous motors.
- Compressors and Pumps: Large capacity compressors and pumps often use synchronous motors for better efficiency.
- Clock Drives: Small synchronous motors are used in electric clocks and timing devices.
4.2 Asynchronous Motor
Asynchronous motors are the most widely used motors in industry. Their self-starting ability and simple construction make them suitable for numerous applications:
- Ceiling Fans: Single-phase induction motors are used in ceiling fans.
- Washing Machines: Domestic washing machines use single-phase induction motors.
- Pumps: Water pumps, submersible pumps, and centrifugal pumps commonly use induction motors.
- Compressors: Air compressors and refrigeration compressors use induction motors.
- Conveyor Systems: Industrial conveyor belts are driven by three-phase induction motors.
- Machine Tools: Lathes, drilling machines, and milling machines use induction motors.
- Cranes and Hoists: Wound rotor induction motors are used in cranes for their high starting torque.
- HVAC Systems: Blowers and air handling units use induction motors.
5. Advantages and Disadvantages of Synchronous Motor
5.1 Advantages of Synchronous Motor
Here are the main advantages of synchronous motors:
- They run at constant speed regardless of load changes.
- They can be used for power factor improvement.
- They have higher efficiency at larger ratings.
- Speed can be controlled by varying the supply frequency.
- They can supply reactive power to the system.
- Torque remains stable even under varying load conditions.
5.2 Disadvantages of Synchronous Motor
The disadvantages of synchronous motors include:
- They are not self-starting and need auxiliary starting methods.
- They require a separate DC excitation source.
- The construction is more complex and expensive.
- Hunting can occur if the load varies suddenly.
- They require more maintenance due to slip rings and brushes.
- They are not suitable for small power applications.
6. Advantages and Disadvantages of Asynchronous Motor
6.1 Advantages of Asynchronous Motor
Here are the main advantages of asynchronous motors:
- They are self-starting and do not need any special starting arrangement.
- The construction is simple and rugged.
- They are cheaper compared to synchronous motors.
- Maintenance requirements are low.
- They are available in a wide range of sizes.
- Squirrel cage motors can work in hazardous environments.
- Speed can be easily controlled using variable frequency drives.
6.2 Disadvantages of Asynchronous Motor
The disadvantages of asynchronous motors include:
- The speed is not constant and changes with load.
- They always operate at lagging power factor.
- Starting current is high (5 to 7 times the rated current).
- Speed control was difficult before the invention of VFDs.
- They draw reactive power from the supply.
- Efficiency is lower than synchronous motors at higher ratings.
7. Which Motor Should You Choose?
The choice between synchronous and asynchronous motor depends on your specific requirements.
Choose Synchronous Motor When:
- You need constant speed operation
- Power factor correction is required
- The motor size is large (above 500 kW)
- Higher efficiency is needed
- You have budget for higher initial cost
Choose Asynchronous Motor When:
- Self-starting is required
- The application is general purpose
- Cost is a major concern
- Less maintenance is preferred
- The motor size is small to medium
For most industrial applications, induction motors are the preferred choice because of their simplicity and low cost. However, for specific applications requiring constant speed or power factor correction, synchronous motors are the better option.
8. Conclusion
Both synchronous motors and asynchronous motors have their own advantages and limitations. Synchronous motors offer constant speed operation and power factor control but are more complex and expensive. Asynchronous motors are simple, rugged, and economical but have slip and lagging power factor issues.
9. Frequently Asked Questions (FAQs)
A synchronous motor is not self-starting because the rotor has high inertia and cannot instantly accelerate to synchronous speed. When the rotating magnetic field starts rotating at synchronous speed, the rotor poles experience alternating forces in opposite directions and fail to start. This is why external starting methods are needed.
A synchronous motor can only run at synchronous speed for a given supply frequency. However, by changing the supply frequency using a variable frequency drive, the motor can be made to run at different speeds. The speed always remains synchronized with the supply frequency.
An induction motor is called asynchronous because the rotor speed is not synchronized with the rotating magnetic field speed. There is always a difference (slip) between the two speeds. The word asynchronous means “not synchronized” which perfectly describes the operation of this motor.
Synchronous motors are generally more efficient than asynchronous motors, especially in larger sizes. This is because synchronous motors do not have slip losses. The efficiency difference becomes more noticeable in motors above 500 kW rating.
No, we cannot use a standard induction motor for power factor correction. Induction motors always operate at lagging power factor and draw reactive power from the supply. Only synchronous motors can be used as synchronous condensers for power factor improvement.
If the DC excitation is removed while the synchronous motor is running, the motor will lose synchronism. The rotor will no longer be able to lock with the rotating magnetic field and will start to slip. The motor may stop or run as an induction motor at reduced speed depending on the design.
A synchronous condenser is a synchronous motor running without any mechanical load. It is used only for power factor correction and reactive power compensation. By adjusting the DC excitation, it can either absorb or supply reactive power to the system.